
B.Tech. Thesis | VEBLoC - Visual Estimation of Branch Loading Capacity
Environmental Robotics Lab (ERL) under guidance of Prof. Stefano Mintchev along with Christian geckeler, Presentation
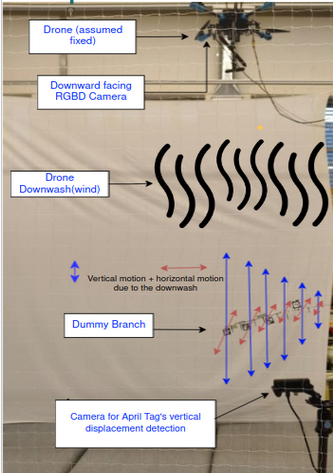
- Designed a novel scene flow (3D optical flow) based end-to-end perception pipeline to estimate tree-branch load capacity and associated uncertainty, enabling safe sensor deployment.
- Built a lab testbed emulating field conditions to capture RGB-D data from a downward-facing camera on a hovering drone, analyzing tree-branch oscillations induced by drone downwash.
- Presented results showcasing performance on 3 reference branches.
- Keywords: Optical Flow, PyTorch, Drone, Loading Capacity.
SLAM using Ouster 3D Lidar & KISS-ICP in our IIT Indore Campus
- keywords: Ouster 3D Lidar, KISS-ICP, SLAM, ROS2
Python Api for Drona Aviation Pluto Drone
IIT Kanpur/ Drona Aviation InterIIT 11.0 Github
- keywords: OpenCV, Python , API developement , RealDrone, Hardware, PID, Trajectory Tracking
Gesture Contorlled Car (Vision Based)
- keywords: TensorFLow, MediaPipe, ESP32, Fast(30fps)
Data Augmentation for Soyabean Leaf Disease Classification
- keywords: Pytorch , Data Augmentation , GANs
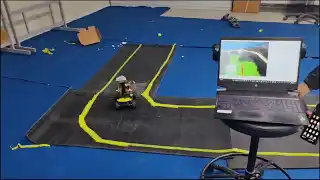
Lane Following and Obstacle Avoiding Car
- keywords: OpenCV, LaneFollowing, EdgeComputing
Flutter Based App for Student-Professor Interaction & Automated Email Sorting
- keywords: Flutter, Firebase , Dart
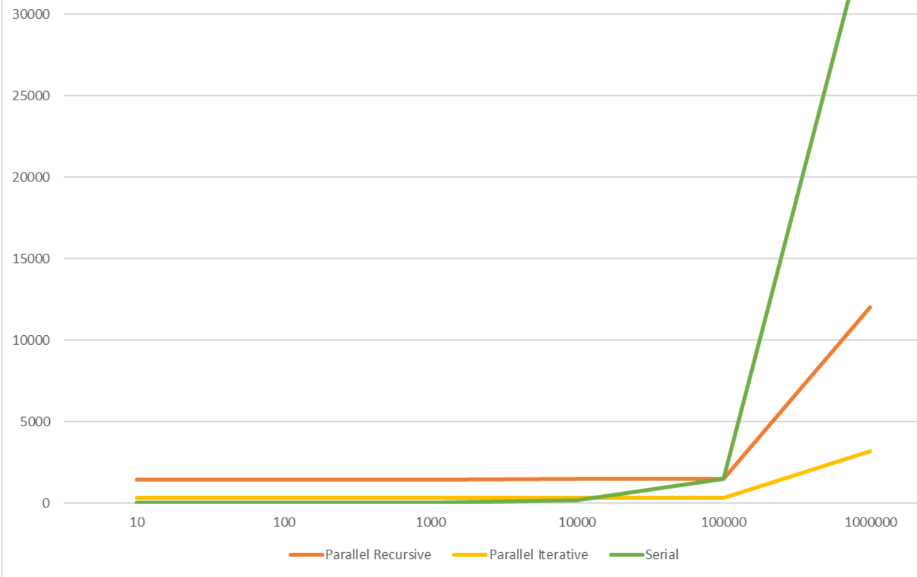
Parallel FFT for Polynomial Multiplicationn
- keywords: OpenMP, C++, Fast Fourier Transform